Q-Learning——一种基于值迭代的强化学习算法
引言: Q-Learning是一种基于值迭代的强化学习算法,它通过不断更新Q值来优化策略。Q值表示在给定状态下采取某个动作的预期回报。Q-Learning算法通过最大化Q值来选择最优动作,从而实现最优策略的求解,下面有是Q-Learning算法介绍与井字棋游戏的实现。
✈️ Q-Learning算法介绍
算法归类
从分类上来看,Q-Learning 具有以下标签:
- 基于价值 (Value-based):输出动作的价值,而非直接输出动作概率。
- 离轨策略 (Off-policy):学习时使用的策略(目标策略,通常是贪婪的)与采集数据时的策略(行为策略,通常是 ϵ-greedy)不同。
- 无模型 (Model-free):不需要知道环境的状态转移概率 P(s′|s, a)。
- 在线 (Online):通常是在与环境交互的过程中实时学习(尽管也可以结合经验回放)。
适用范围与局限
- 适用场景:适用于连续或离散、有限或无限状态空间、确定性或随机性的环境。
- 局限性:在处理高维状态空间(如图像输入)和连续动作空间(如机器人关节角度)时,传统的表格型 Q-Learning 表现不佳(因为表格存不下,通常需要升级为 Deep Q-Network)。
基本思想
Q-Learning 的核心是不需要知道环境的动态模型。智能体通过与环境的直接交互来学习策略。
- 核心机制:通过更新状态-动作值函数(Q值),来评估每个动作在每个状态下的价值。
- 更新方式:采用离线更新(Off-policy)方法,在每次交互后利用 Bellman 方程立即更新 Q 值,使得算法在训练过程中不断优化。
- 收敛目标:该过程持续进行,直到 Q 值函数收敛,最终得到最优策略 π*。
🚀 Q-Learning算法流程
Q-Learning 是一种无模型的强化学习技术。在经典的表格型 Q-Learning 中,我们通常使用两个主要的矩阵(表格)来表示和更新信息。
两个核心矩阵
奖励矩阵 (R-Table)
- 结构:每一行代表一个状态 (s),每一列代表一个动作 (a)。
- 含义:矩阵中的元素 R(s, a) 表示在状态 s 下采取动作 a 时,从环境获得的即时奖励 (Immediate Reward)。
- 数值:可以是正数(奖励)、负数(惩罚)或零。
Q值矩阵 (Q-Table)
- 结构:同样每一行代表一个状态,每一列代表一个动作。
- 含义:矩阵中的元素 Q(s, a) 表示在状态 s 下采取动作 a,并在未来遵循最佳策略所能获得的预期累积回报。
- 关系:R 是环境给的反馈,Q 是智能体学到的经验。
算法核心步骤
Q-Learning 的核心思想是通过不断更新 Q 值来逼近最优 Q 函数 Q*。
第一步:初始化
由于刚开始 Agent 对外界一无所知,矩阵 Q 通常初始化为零矩阵,如果状态数目未知,可以让 Q 从空表出发,每次发现新状态时动态增加行列。
第二步:状态转移与更新
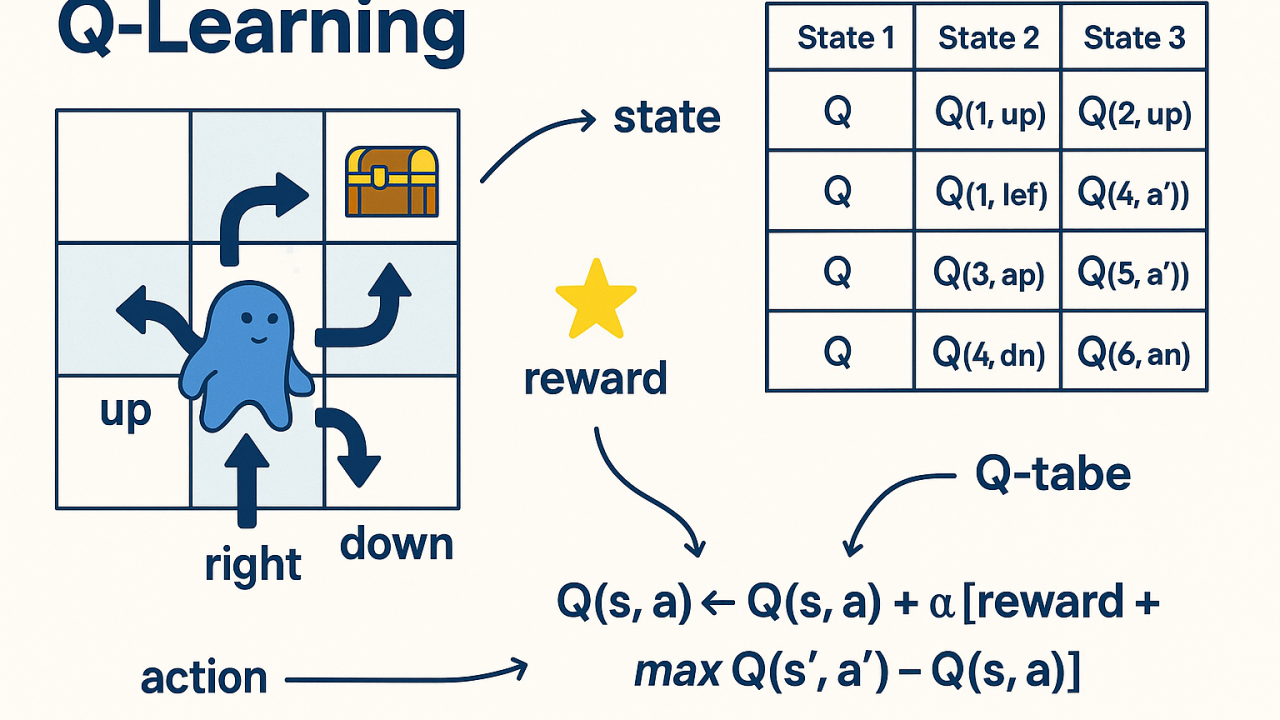
Agent 在每一个 回合 (Episode) 中不断探索,直到到达目标状态。在每一步 (s → s′ ) 中,遵循以下规则更新:
$$ Q(s, a) \leftarrow Q(s, a) + \alpha \left[ \underbrace{R(s, a) + \gamma \cdot \max_{a'} Q(s', a')}_{\text{现实 (Target)}} - \underbrace{Q(s, a)}_{\text{预期 (Prediction)}} \right] $$
公式参数详解:
- s, a:当前的状态和采取的行为。
- s′, a′:转移到的下一个状态及下一个行为。
- γ (折扣因子, Discount Factor):0 ≤ γ < 1。
- γ ≈ 0:智能体“短视”,只看重眼前的即时奖励。
- γ ≈ 1:智能体“远视”,更看重未来的长期奖励。
- α (学习率, Learning Rate):控制更新的步长(通常在 0 到 1 之间)。
第三步:循环与收敛
- Episode(回合):Agent 从任意初始状态出发,不断探索直到达到目标状态(或达到步数限制),这被称为一个 Episode。
- 无监督学习:在没有老师直接指导的情况下,Agent 通过“尝试-反馈-更新”的循环,不断修正 Q 表中的数值。
随着 Episode 的增加,Q 表中的数值会越来越准确,最终 Agent 只需在每个状态 s 选择 Q(s, a) 最大的那个动作,就是最优策略。
📖 Q-Learning 求解
Q-Learning 的数学核心在于利用贝尔曼方程(Bellman Equation)进行迭代更新,逐步逼近最优的动作价值函数。
贝尔曼方程
贝尔曼方程是动态规划中的核心原理,它将一个状态的价值分解为即时奖励和折扣后的未来价值的总和。
对于状态价值函数 Vπ(s) 和动作价值函数 Qπ(s, a),贝尔曼期望方程表示为:
Vπ(s) = ∑a ∈ Aπ(a|s)[R(s, a) + γ∑s′ ∈ SP(s′|s, a)Vπ(s′)]
Qπ(s, a) = R(s, a) + γ∑s′ ∈ SP(s′|s, a)Vπ(s′)
符号定义:
- S:状态空间。
- A:动作空间。
- π(a|s):策略函数,表示在状态 s 下采取动作 a 的概率。
- R(s, a):在状态 s 下采取动作 a 获得的即时奖励(期望值)。
- P(s′|s, a):状态转移概率,即从状态 s 采取动作 a 转移到状态 s′ 的概率。
- γ:折扣因子,0 ≤ γ < 1,用于平衡当前奖励与远期奖励。
Q-Learning 更新规则
Q-Learning 是一种无模型(Model-Free)算法,它不需要知道转移概率 P。它利用时间差分(Temporal Difference, TD)方法,直接通过经验数据来更新 Q 值。
其迭代更新规则如下:
$$ Q(s_t, a_t) \leftarrow Q(s_t, a_t) + \alpha \left[ \underbrace{R_{t+1} + \gamma \max_{a} Q(s_{t+1}, a)}_{\text{TD 目标 (Target)}} - \underbrace{Q(s_t, a_t)}_{\text{当前估计}} \right] $$
参数说明:
- Q(st, at):时间 t 下,状态 st 和动作 at 的估计价值。
- Rt + 1:执行动作 at 后实际获得的即时奖励。
- maxaQ(st + 1, a):在下一状态 st + 1 中,假设采取最优动作所能获得的最大 Q 值(贪婪估计)。
- α:学习率(Learning Rate),0 ≤ α ≤ 1,控制新旧信息的覆盖程度。
- γ:折扣因子。
从贝尔曼方程到 Q-Learning
Q-Learning 算法的最终目标是找到一个最优策略 π*,使得在该策略下每个状态动作对的 Q 值最大化,即:
π* = arg maxπQπ(s, a)
我们可以从贝尔曼方程推导出 Q-Learning 逼近的目标形式。
假设我们有一个策略 π,其对应的动作价值函数为 Qπ。根据贝尔曼方程:
Qπ(s, a) = R(s, a) + γ∑s′ ∈ SP(s′|s, a)Vπ(s′)
由于最优状态价值 V*(s′) 等于在该状态下选择最优动作的 Q 值,即 V*(s′) = maxa′Q*(s′, a′),我们可以进行替换。
如果我们将策略 π 设定为最优策略 π*,则得到了贝尔曼最优方程(Bellman Optimality Equation):
Q*(s, a) = R(s, a) + γ∑s′ ∈ SP(s′|s, a)maxa′Q*(s′, a′)
推导结论: 这个方程表明,最优动作价值 Q*(s, a) 由即时奖励和下一状态所有可能动作中的最大 Q 值的期望构成。 Q-Learning 算法正是通过不断的采样和更新,利用 R + γmax Q(s′, a′) 来逼近上述方程中的期望值,从而在不知道 P(s′|s, a) 的情况下求得马尔科夫决策过程的最优解。
🎮 井字棋游戏
Coming Soon!